摘 要: 设计了一套混凝土粉料仓料位监测系统。该设计基于 PLC 自动控制系统,将高频雷达液位计、高清监控和LED 灯带预警技术有效组合,能实现料位的准确连续监测以及能及时连续的获得粉料仓的生产技术数据。利用 AN- SYS Workbench 软件对料位监测系统关键零部件清洗臂进行静力学分析,验证其设计尺寸满足使用要求。
0 引 言
在混凝土行业中,料位计主要是用于各种仓、库物料位置的测量,储存物料的多少将直接影响到企业生产效率及生产安全,在生产管理中,料位监测是非常重要且必不可少的环节[1]。但由于其工作环境恶劣,目前对料位的监测或多或少都存在这不足,国内有水泥行业料位监测采用叶轮式阻旋物位计对料仓内水泥粉的监测,其原理是利用水泥粉淹没叶轮,叶轮的阻力增大,转动电机产生异常电信号,提供报警[2-3]。但该装置不能及时显示混凝土粉料仓的瞬时物位情况,也不能获得混凝土密闭粉料仓内部生产技术数据。
另外,在水泥粉料仓进料时物位呈一个锥面,粉料仓中心物位较高但侧壁物位较低,而阻旋物位计安装在水泥粉料仓侧壁,不能及时反映物位zui高点变化情况,可能造成冒顶报警不及时的安全隐患,一旦发生冒顶事故,将对当地环境产生严重破坏。
针对上述的不足,提供一套实时、实况及连续地监测混凝土粉料仓物料料位监测装置,对防止混凝土粉料仓料位的非正常情况,提供混凝土粉料仓生产状态技术数据,提高整个混凝土搅拌站的安全性,实现混土搅拌站的高效、高质量生产具有非常重要的意义。
1、监测系统构成
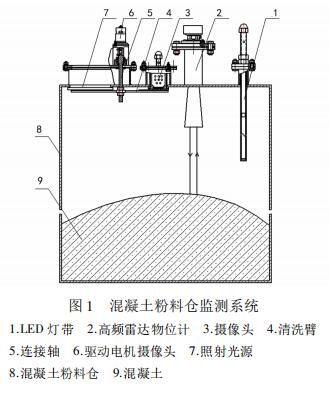
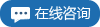
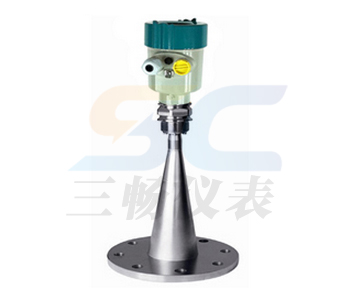
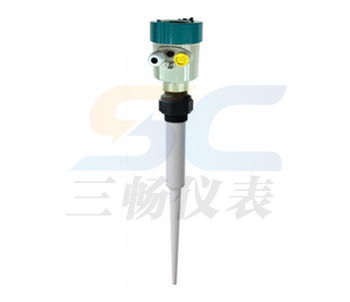
混凝土粉料仓料位监测系统主要是由高频雷达液位计、照射光源、驱动电机、连接轴、清洗臂、摄像头、LED 灯带等组成。料位监测系统如图 1 所示。
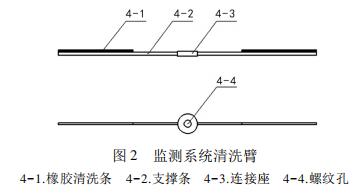
清洗臂主要是由支撑条、橡胶清洗条、连接座组成。连接座内设有螺纹孔,橡胶清洗条固定粘贴在支撑条上。清洗臂如图 2 所示。
2 监测系统工作原理
混凝土粉料仓料位监测系统是利用高频雷达液位计 1 发射与接收脉冲信号来测量混凝土粉料仓料位高度[5],再结合照射光源 2 及高清摄像头 6 实时观察混凝土粉料仓内的料位情况,检测 LED 灯带 7 发出的红外光情况来判断料位状况,zui后工作人员可以通过工控机面板监测料位情况,控制物料进出口,从而保证水泥粉与砂石等物料的配比精度,提高混凝土质量。
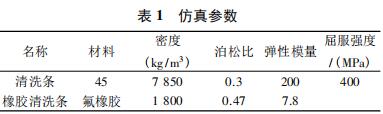
由于混凝土粉料仓内的粉尘会沾染到照射光源及高清摄像头,使其成像模糊时,启动驱动电机 3 带动连接座 4-3 旋转,通过橡胶清洗条 4-1 对照射光源及高清摄像头进行清洗。 3 监测系统关键零部件的静力学分析为了保证粉料仓料位监测系统成像的清晰度,需要对关键零部件清洗臂进行静力学分析,验证清洗臂的设计是否满足使用要求。 3.1 建立有限元模型及参数设定当应变幅度小于 10%时常把应力应变曲线的斜率作为其弹性模量[7],清洗时清洗橡胶条的压缩量为 0.4 mm,计算可得,每根清洗橡胶条的重量 G = 4. 32×10-2N,F弹 = 2.08 N,F静 = 1.29 N。入 Engineer- ing Data 定义模型的材料属性,仿真参数如表 1 所示。
利用 ANSYS Workbench 能够与多软件的数据交换及共享的功能[6],将 Solid works 搭建的监测系统清洗臂三维模型导入 ANSYS Workbench 中,如图 3所示。
3.2 网格划分
合理的划分网格是建立和分析有限元模型的重要基础,网格质量对有限元计算精度和敛散性有着至关重要的影响[8]。网格划分关键在于设定单元类型和单元大小,本文对该模型的 Element Size 设定为2 mm,得到 7 908 个单元,15 527 个节点。清洗臂的网格划分效果图如图 4 所示。
3.3 添加载荷与约束条件
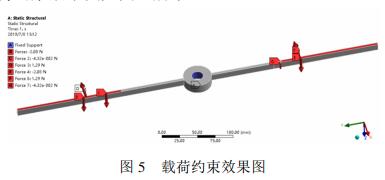
清洗臂是通过驱动电机带动旋转轴进行工作,按照实际工作情况,须将清洗臂中的连接座孔施加固定约束,对清洗条上的映射面部分施加载荷。得到的载荷约束效果图如图 5 所示。
3.4 仿真结果分析
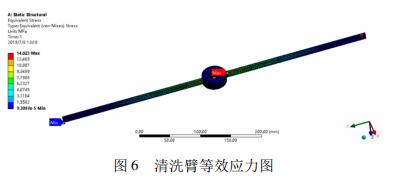
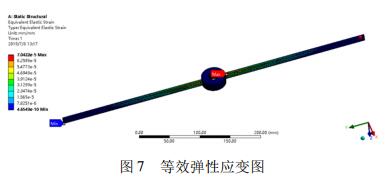
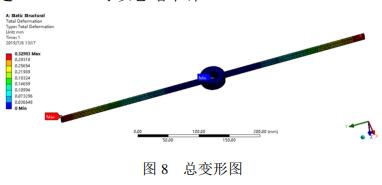
利用有限元分析软件求解,得到的分析结果如图6~8 依次为清洗臂的等效应力图、等效弹性应变图和总变形图。
如图 6 等效应力图的分析结果知,靠近连接座的清洗条应力较为集中,zui大的应力为 14.023 MPa,整个清洗臂采用的是 45 号钢,材料的屈服极限为 400 MPa,故该结构的安全系数为 29.2,说明在额定载荷下,整个结构的强度和刚度是满足使用要求的,由于其安全系数较大,后续可优化其使用材料。
从图 7 的分析结果可以看出,清洗条相当于悬臂梁,清洗条与连接座连接处的变形量zui大,变形量不足 0.001 mm,可以忽略不计。
图 8 为清洗臂的总变形图,从图中可以看出,在各个力的作用下发生的变形量zui大为 0.32 mm,相对于整个清洗臂的尺寸来说,变形量极小。故说明在额定载荷下,刚度是满足要求的,不会出现断裂和塑性变形等情况。通过对清洗臂在额定载荷下的静力学分析,清洗条与连接座之间存在应力集中现象,但变形量较小,且不会出现塑性变形,符合清洗臂设计尺寸要求。
4 结 语
设计了一套能够实时、实况及连续地监测混凝土粉料仓物料料位监测装置。通过三维建模和 ANSYS Work额应力、应变云图,结合材料的使用性能参数对比分析,验证了该清洗臂的设计尺寸满足使用要求。目 前,该套混凝土粉料仓料位监测系统正在邵阳市恒远混凝土有限公司试用。据初步结果,工作人员能够通过工控面板准确、及时、连续的获得混凝土粉料仓内的生产数据,大大地减少了工作人员的工作强度,提高了企业的经济效益和社会效益。
上一篇:核电厂GSS系统疏水箱雷达液位计故障分析及处理
下一篇:浅析雷达物位计在精矿自动化控制系统中的作用

 销售总机
0517-86998326
销售总机
0517-86998326
 图文传真
0517-86998327
图文传真
0517-86998327
 电子邮箱
jssanchang
电子邮箱
jssanchang